
Dot Product:
The dot product of two vectors is a scalar quantity that measures the degree of similarity between them. The dot product of two vectors A and B is defined as:
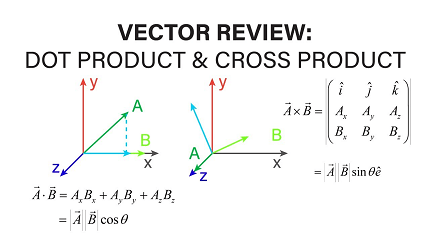
A · B = |A| |B| cos(θ)
where |A| and |B| are the magnitudes of the vectors A and B, respectively, and θ is the angle between them.
In component form, the dot product of two vectors A = (A₁, A₂, A₃) and B = (B₁, B₂, B₃) is given by:
A · B = A₁B₁ + A₂B₂ + A₃B₃
The dot product is commutative, i.e., A · B = B · A, and distributive, i.e., A · (B + C) = A · B + A · C.
The dot product has many applications in physics and engineering, including work, energy, and projection of one vector onto another.
Cross Product:
The cross product of two vectors is a vector quantity that is perpendicular to both of them. The cross product of two vectors A and B is defined as:
A x B = |A| |B| sin(θ) n
where |A| and |B| are the magnitudes of the vectors A and B, respectively, θ is the angle between them, and n is a unit vector perpendicular to both A and B, as determined by the right-hand rule.
In component form, the cross product of two vectors A = (A₁, A₂, A₃) and B = (B₁, B₂, B₃) is given by:
A x B = (A₂B₃ – A₃B₂, A₃B₁ – A₁B₃, A₁B₂ – A₂B₁)
The cross product is anti-commutative, i.e., A x B = -B x A, and distributive, i.e., A x (B + C) = A x B + A x C.
The cross product has many applications in physics and engineering, including torque, angular momentum, and the determination of the direction of a magnetic field around a current-carrying wire.
What is Required Dot and cross products
The dot product and cross product have different requirements and are used in different ways.
Dot product requirements:
- The dot product requires two vectors to be of the same dimension.
- The dot product is commutative, meaning the order of the vectors does not matter.
- The dot product is distributive, meaning it follows the distributive property of algebra.
- The dot product is used to find the angle between two vectors, to project one vector onto another, and to find the work done by a force acting on an object.
Cross product requirements:
- The cross product requires two vectors to be three-dimensional.
- The cross product is anti-commutative, meaning the order of the vectors matters, and the result will be negated if the order is switched.
- The cross product is distributive, meaning it follows the distributive property of algebra.
- The cross product is used to find the vector perpendicular to two given vectors, to calculate torque and angular momentum, and to determine the direction of a magnetic field around a current-carrying wire.
In summary, the dot product is used to find the similarity between two vectors, while the cross product is used to find a new vector that is perpendicular to both of the given vectors.
Who is Required Dot and cross products
The dot product and cross product are fundamental mathematical operations used in many fields, including mathematics, physics, engineering, and computer graphics.
In mathematics, the dot product and cross product are used in linear algebra, calculus, and geometry.
In physics, the dot product and cross product are used to describe the motion and forces acting on objects, including torque, angular momentum, work, energy, and the direction of a magnetic field.
In engineering, the dot product and cross product are used in structural analysis, fluid dynamics, and electrical circuits.
In computer graphics, the dot product and cross product are used to perform transformations, such as rotations and reflections, on 3D objects.
In summary, the dot product and cross product are used in a wide range of fields to solve problems involving vectors and their properties.
When is Required Dot and cross products
The dot product and cross product are used in a variety of situations where vectors are involved.
Dot product:
- Finding the angle between two vectors: The dot product is used to find the angle between two vectors using the formula A · B = |A| |B| cos(θ).
- Projection of one vector onto another: The dot product is used to project one vector onto another using the formula projᵥu = ((v · u)/|u|²)u, where v is the vector to be projected, and u is the vector onto which v is projected.
- Work done by a force: The dot product is used to find the work done by a force acting on an object using the formula W = F · d, where F is the force applied, and d is the displacement of the object.
Cross product:
- Finding the vector perpendicular to two given vectors: The cross product is used to find the vector perpendicular to two given vectors using the formula A x B = |A| |B| sin(θ) n.
- Torque: The cross product is used to calculate torque, which is the rotational equivalent of force, using the formula τ = r x F, where r is the position vector from the pivot point to the point where the force is applied, and F is the force applied.
- Determining the direction of a magnetic field: The cross product is used to determine the direction of a magnetic field around a current-carrying wire using the right-hand rule.
In summary, the dot product and cross product are used in a variety of situations where vectors are involved, such as finding the angle between vectors, projecting one vector onto another, finding the perpendicular vector, calculating torque, and determining the direction of a magnetic field.
Where is Required Dot and cross products
The dot product and cross product are used in many fields, including:
- Physics: The dot product and cross product are used extensively in physics to describe the motion and forces acting on objects. They are used to calculate work, torque, angular momentum, and the direction of a magnetic field.
- Mathematics: The dot product and cross product are important concepts in linear algebra, calculus, and geometry. They are used to solve systems of equations, find eigenvectors and eigenvalues, and determine the area of a parallelogram or volume of a parallelepiped.
- Engineering: The dot product and cross product are used in many areas of engineering, such as structural analysis, fluid dynamics, and electrical circuits. They are used to calculate stresses and strains in materials, flow rates and pressure drops in fluids, and the direction of magnetic fields in electrical systems.
- Computer graphics: The dot product and cross product are used extensively in computer graphics to perform transformations on 3D objects. They are used to calculate lighting and shading effects, and to rotate and scale objects.
- Navigation and GPS: The dot product and cross product are used in navigation and GPS systems to determine the position and velocity of objects. They are used to calculate the angle between two objects, the distance between two points, and the direction of movement.
In summary, the dot product and cross product are used in a wide range of fields, including physics, mathematics, engineering, computer graphics, and navigation and GPS systems.
How is Required Dot and cross products
The dot product and cross product are mathematical operations that involve vectors. Here’s how they are calculated:
Dot product:
The dot product of two vectors A and B is calculated as the sum of the products of their corresponding components:
A · B = A₁B₁ + A₂B₂ + A₃B₃ + … + AₙBₙ
where A₁, A₂, A₃, …, Aₙ are the components of vector A, and B₁, B₂, B₃, …, Bₙ are the components of vector B.
Cross product:
The cross product of two vectors A and B is calculated as follows:
A x B = |A| |B| sin(θ) n
where |A| and |B| are the magnitudes of vectors A and B, θ is the angle between them, and n is a unit vector perpendicular to both A and B.
The direction of n is determined by the right-hand rule: point the fingers of your right hand in the direction of vector A, curl them towards vector B, and your thumb will point in the direction of the cross product.
The magnitude of the cross product is given by:
|A x B| = |A| |B| sin(θ)
In summary, the dot product and cross product are calculated differently, but both involve the use of vectors and can be used in various applications such as finding the angle between two vectors, determining the direction of a magnetic field, and projecting one vector onto another.
Case Study on Dot and cross products
One practical application of dot and cross products is in robotics, specifically in the control of robotic arms. Robotic arms are used in many industries, such as manufacturing, medicine, and agriculture, to perform tasks that are repetitive, dangerous, or difficult for humans to do. To control a robotic arm, it is necessary to determine its position and orientation in space. This is done using a mathematical model based on the dot and cross products.
The position of a robotic arm is defined by its end effector, which is the device that performs the actual task, such as welding, cutting, or gripping. The orientation of the end effector is described by its orientation matrix, which is a 3×3 matrix that represents the rotation of the end effector with respect to a fixed frame of reference.
To calculate the orientation matrix, it is necessary to know the direction of the three axes of the end effector. This can be done using the dot and cross products. For example, the direction of the x-axis can be determined by taking the cross product of the y-axis and z-axis, since the x-axis is perpendicular to both of them. Similarly, the y-axis can be determined by taking the cross product of the z-axis and x-axis, and the z-axis can be determined by taking the cross product of the x-axis and y-axis.
Once the orientation matrix is calculated, it can be used to determine the position and orientation of the end effector with respect to the fixed frame of reference. This is done using the dot product. Specifically, the dot product of the orientation matrix and the position vector of the end effector gives the position of the end effector with respect to the fixed frame of reference.
The dot and cross products are also used in inverse kinematics, which is the process of determining the joint angles of the robotic arm that will result in a desired position and orientation of the end effector. This is done by using the dot and cross products to calculate the direction and magnitude of the joint angles that will result in the desired position and orientation.
In summary, the dot and cross products are used in the control of robotic arms to determine the position and orientation of the end effector with respect to a fixed frame of reference, and to calculate the joint angles that will result in a desired position and orientation. This is just one example of how dot and cross products are used in real-world applications.
White paper on Dot and cross products
Introduction
Dot and cross products are fundamental mathematical operations that involve vectors. These operations have a wide range of applications in various fields, including physics, engineering, and computer graphics. In this white paper, we will discuss the mathematical properties of dot and cross products, as well as their applications in different fields.
Dot Product
The dot product, also known as the scalar product, is a binary operation that takes two vectors as input and produces a scalar as output. The dot product of two vectors is defined as the product of their magnitudes and the cosine of the angle between them.
a·b = |a||b|cos(θ)
where a and b are two vectors, |a| and |b| are their magnitudes, and θ is the angle between them.
The dot product has several important properties, including commutativity, distributivity, and associativity. These properties make it a powerful tool for calculating projections, distances, and angles between vectors.
One of the most common applications of the dot product is in calculating the angle between two vectors. The angle between two vectors can be calculated using the dot product as follows:
cos(θ) = (a·b)/(|a||b|)
where θ is the angle between the vectors a and b.
Another important application of the dot product is in calculating projections. The projection of a vector a onto a vector b is given by:
proj_b(a) = ((a·b)/(|b|²)) * b
where proj_b(a) is the projection of vector a onto vector b.
Cross Product
The cross product, also known as the vector product, is a binary operation that takes two vectors as input and produces a vector as output. The cross product of two vectors is defined as the product of their magnitudes, the sine of the angle between them, and a unit vector perpendicular to both of them.
a x b = |a||b|sin(θ) * n
where a and b are two vectors, |a| and |b| are their magnitudes, θ is the angle between them, and n is a unit vector perpendicular to both a and b.
The cross product has several important properties, including anti-commutativity, distributivity, and associativity. These properties make it a powerful tool for calculating areas, volumes, and moments of force.
One of the most common applications of the cross product is in calculating the area of a parallelogram spanned by two vectors. The area of a parallelogram spanned by two vectors a and b is given by:
Area = |a x b|
Another important application of the cross product is in calculating moments of force. The moment of a force about a point is given by the cross product of the force vector and the position vector of the point with respect to a chosen origin.
Conclusion
In conclusion, dot and cross products are fundamental mathematical operations that have a wide range of applications in various fields. The dot product is a scalar quantity that is used to calculate projections, distances, and angles between vectors. The cross product is a vector quantity that is used to calculate areas, volumes, and moments of force. The mathematical properties of dot and cross products make them powerful tools for solving a variety of problems in physics, engineering, and computer graphics.