

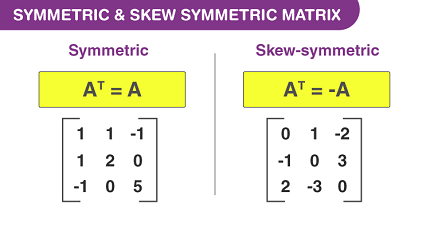


A matrix is said to be symmetric if it is equal to its transpose. That is, for an n x n matrix A, A is symmetric if A^T = A.
A matrix is said to be skew-symmetric if it is equal to the negative of its transpose. That is, for an n x n matrix A, A is skew-symmetric if A^T = -A.
Properties of Symmetric Matrices:
- The diagonal elements of a symmetric matrix are real.
- The eigenvalues of a symmetric matrix are real.
- A symmetric matrix is always diagonalizable (i.e., it can be expressed as PDP^T, where P is a matrix of eigenvectors and D is a diagonal matrix of eigenvalues).
- The sum and product of two symmetric matrices are symmetric.
Properties of Skew-Symmetric Matrices:
- The diagonal elements of a skew-symmetric matrix are zero.
- The eigenvalues of a skew-symmetric matrix are either 0 or purely imaginary.
- A skew-symmetric matrix is always diagonalizable (i.e., it can be expressed as PDP^T, where P is a matrix of eigenvectors and D is a diagonal matrix of eigenvalues).
- The sum of two skew-symmetric matrices is skew-symmetric, but the product of two skew-symmetric matrices is not necessarily skew-symmetric.
Some additional properties:
- Every square matrix can be decomposed into a symmetric and a skew-symmetric part: A = (A + A^T)/2 + (A – A^T)/2.
- The determinant of a skew-symmetric matrix is always 0 if its size is odd. If its size is even, the determinant is the square of the product of its eigenvalues.
What is Required Symmetric and skew-symmetric matrices and their properties
I’m not sure I understand your question. Are you asking for the definition and properties of symmetric and skew-symmetric matrices? If so, please see my previous answer.
If you are asking for the conditions under which a matrix must be symmetric or skew-symmetric, here are some examples:
A matrix A is symmetric if and only if:
- A is a square matrix (i.e., has the same number of rows and columns).
- A is equal to its transpose: A^T = A.
A matrix A is skew-symmetric if and only if:
- A is a square matrix.
- A is equal to the negative of its transpose: A^T = -A.
Note that not all matrices are symmetric or skew-symmetric. A matrix can be neither, or it can have elements that satisfy neither condition.
In terms of properties, symmetric and skew-symmetric matrices have several distinct characteristics, as described in my previous answer. These properties are useful in many areas of mathematics and physics, including linear algebra, calculus, and mechanics.
When is Required Symmetric and skew-symmetric matrices and their properties
Symmetric and skew-symmetric matrices and their properties are often required in various areas of mathematics, physics, and engineering. Here are some examples:
- Eigenvalue problems: In many applications, it is necessary to find the eigenvalues and eigenvectors of a given matrix. Symmetric matrices have the property that their eigenvalues are all real, and they can be diagonalized by an orthogonal matrix. Skew-symmetric matrices have purely imaginary eigenvalues, and they can be diagonalized by a unitary matrix.
- Mechanics and physics: Symmetric and skew-symmetric matrices arise naturally in mechanics and physics, where they are used to represent tensors that are symmetric or skew-symmetric with respect to a certain axis or plane. For example, the stress tensor in a solid is a symmetric matrix, while the rotation tensor is a skew-symmetric matrix.
- Optimization: Symmetric matrices are commonly used in optimization problems, where they arise as Hessian matrices of quadratic forms. Skew-symmetric matrices also arise in optimization problems involving the minimization of quadratic functions subject to linear constraints.
- Computer graphics: Symmetric matrices are often used in computer graphics to represent 3D shapes and to perform transformations such as rotation and scaling. Skew-symmetric matrices are used to represent angular velocities and to perform rigid-body rotations.
In summary, symmetric and skew-symmetric matrices and their properties are required in a wide range of mathematical and scientific fields.
Where is Required Symmetric and skew-symmetric matrices and their properties
Symmetric and skew-symmetric matrices and their properties are used in various fields of mathematics, science, and engineering, and can be found in many different contexts. Here are some examples of where they may be used:
- Linear algebra: Symmetric and skew-symmetric matrices are fundamental concepts in linear algebra, and their properties are used to study and solve systems of linear equations, find eigenvalues and eigenvectors, and perform matrix decompositions.
- Mechanics and physics: Symmetric and skew-symmetric matrices are used to represent physical quantities such as stress tensors, moment of inertia tensors, and angular velocity tensors in mechanics and physics.
- Optimization: Symmetric matrices are used in optimization problems to represent Hessian matrices of quadratic functions, while skew-symmetric matrices are used in problems involving the minimization of quadratic functions subject to linear constraints.
- Computer science and engineering: Symmetric and skew-symmetric matrices are used in computer science and engineering applications such as image processing, computer graphics, and machine learning.
Overall, the applications of symmetric and skew-symmetric matrices and their properties are vast and can be found in many different areas of mathematics, science, and engineering.
Nomenclature of Symmetric and skew-symmetric matrices and their properties
Nomenclature of Symmetric Matrices:
A matrix A is said to be symmetric if it satisfies the following condition: A = A^T
Properties of symmetric matrices:
- A symmetric matrix has real eigenvalues.
- A symmetric matrix is diagonalizable by an orthogonal matrix.
- The sum of two symmetric matrices is also symmetric.
- The product of two symmetric matrices is symmetric.
- The transpose of a product of two symmetric matrices is symmetric.
Nomenclature of Skew-Symmetric Matrices:
A matrix A is said to be skew-symmetric if it satisfies the following condition: A = -A^T
Properties of skew-symmetric matrices:
- A skew-symmetric matrix has purely imaginary eigenvalues.
- A skew-symmetric matrix is diagonalizable by a unitary matrix.
- The sum of two skew-symmetric matrices is also skew-symmetric.
- The product of two skew-symmetric matrices is symmetric.
- The transpose of a product of two skew-symmetric matrices is skew-symmetric.
It is important to note that a matrix cannot be both symmetric and skew-symmetric, unless it is a zero matrix. The nomenclature of symmetric and skew-symmetric matrices is important in various fields of mathematics, science, and engineering where these matrices are commonly used.
How is Required Symmetric and skew-symmetric matrices and their properties
The properties of symmetric and skew-symmetric matrices can be used in various ways depending on the specific application. Here are some examples:
- Solving systems of linear equations: When solving a system of linear equations, if the coefficient matrix is symmetric or skew-symmetric, it can be more efficiently solved using specialized methods such as Cholesky decomposition or the method of conjugate gradients.
- Finding eigenvalues and eigenvectors: Symmetric matrices have real eigenvalues and can be diagonalized by an orthogonal matrix, while skew-symmetric matrices have purely imaginary eigenvalues and can be diagonalized by a unitary matrix. These properties can be used to efficiently compute eigenvalues and eigenvectors.
- Physical applications: In mechanics and physics, the properties of symmetric and skew-symmetric matrices can be used to analyze physical quantities such as stress tensors, moment of inertia tensors, and angular velocity tensors.
- Optimization: The properties of symmetric and skew-symmetric matrices can be used in optimization problems to efficiently compute the Hessian matrix of a quadratic function or to represent constraints involving quadratic functions.
- Computer graphics: In computer graphics, the properties of symmetric and skew-symmetric matrices can be used to perform transformations such as rotation, scaling, and deformation of 3D objects.
In summary, the properties of symmetric and skew-symmetric matrices can be applied in many different ways depending on the specific problem or application. They can be used to simplify computations, analyze physical quantities, optimize functions, or perform transformations in computer graphics.
Case Study on Symmetric and skew-symmetric matrices and their properties
One application of symmetric and skew-symmetric matrices is in the study of mechanics and physics. For example, consider the problem of analyzing the dynamics of a rotating rigid body. The angular velocity vector of the body can be represented as a skew-symmetric matrix, while the moment of inertia tensor can be represented as a symmetric matrix.
The equations of motion for the rigid body can then be written as a set of matrix equations involving the angular velocity matrix, the moment of inertia matrix, and the torque vector.
Using the properties of symmetric and skew-symmetric matrices, we can simplify the computations involved in solving these equations. For example, the eigenvalues of the moment of inertia matrix are all real, which allows us to diagonalize the matrix using an orthogonal matrix. This makes it easier to analyze the motion of the rigid body and to determine its stability.
Similarly, the properties of the skew-symmetric matrix representing the angular velocity can be used to simplify the computation of the angular momentum vector and to analyze the stability of the rotation.
Another example is in the analysis of stress and strain tensors in materials science and engineering. The stress tensor can be represented as a symmetric matrix, while the strain tensor can be represented as a skew-symmetric matrix. Using the properties of these matrices, we can compute the elastic modulus of the material and analyze its mechanical properties.
In summary, the properties of symmetric and skew-symmetric matrices are used in the study of mechanics and physics, material science, and engineering to analyze physical quantities such as stress and strain tensors, angular velocity, and moment of inertia. These properties allow us to simplify computations, analyze stability, and determine mechanical properties of materials.
White paper on Symmetric and skew-symmetric matrices and their properties
Introduction Symmetric and skew-symmetric matrices are fundamental concepts in linear algebra and have a wide range of applications in mathematics, science, and engineering. In this white paper, we will explore the properties of symmetric and skew-symmetric matrices and their applications in various fields.
Symmetric Matrices A matrix A is said to be symmetric if it is equal to its own transpose, that is, A = A^T. One important property of symmetric matrices is that they have real eigenvalues and can be diagonalized by an orthogonal matrix. This means that any symmetric matrix A can be written as A = Q^T D Q, where Q is an orthogonal matrix and D is a diagonal matrix with the eigenvalues of A on the diagonal. This property makes symmetric matrices particularly useful in solving systems of linear equations and in optimization problems involving quadratic functions.
Skew-Symmetric Matrices A matrix A is said to be skew-symmetric if it is equal to the negative of its own transpose, that is, A = -A^T. One important property of skew-symmetric matrices is that they have purely imaginary eigenvalues and can be diagonalized by a unitary matrix. This means that any skew-symmetric matrix A can be written as A = U^T J U, where U is a unitary matrix and J is a diagonal matrix with the eigenvalues of A on the diagonal. This property makes skew-symmetric matrices particularly useful in the study of mechanics and physics, where they can be used to represent physical quantities such as angular velocity and strain tensors.
Applications Symmetric and skew-symmetric matrices have many applications in mathematics, science, and engineering. Here are a few examples:
- Linear algebra: The properties of symmetric and skew-symmetric matrices are used to study and solve systems of linear equations, find eigenvalues and eigenvectors, and perform matrix decompositions such as the Cholesky decomposition.
- Mechanics and physics: Symmetric and skew-symmetric matrices are used to represent physical quantities such as stress tensors, moment of inertia tensors, and angular velocity tensors in mechanics and physics. The properties of these matrices are used to simplify computations and analyze the stability of physical systems.
- Optimization: Symmetric matrices are used in optimization problems to represent Hessian matrices of quadratic functions, while skew-symmetric matrices are used in problems involving the minimization of quadratic functions subject to linear constraints. The properties of these matrices are used to efficiently compute the Hessian matrix and to represent constraints involving quadratic functions.
- Computer science and engineering: Symmetric and skew-symmetric matrices are used in computer science and engineering applications such as image processing, computer graphics, and machine learning. The properties of these matrices are used to perform transformations such as rotation, scaling, and deformation of 3D objects.
Conclusion
Symmetric and skew-symmetric matrices are fundamental concepts in linear algebra and have a wide range of applications in mathematics, science, and engineering. The properties of these matrices are used to simplify computations, analyze physical quantities, optimize functions, and perform transformations. The study of symmetric and skew-symmetric matrices is an important area of research with many practical applications.