
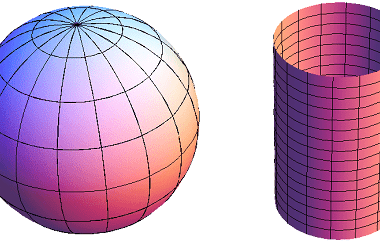
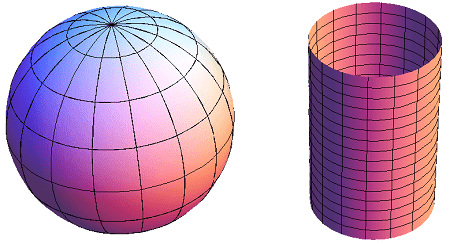
Cylinders and Spheres
Cylinders and spheres are both three-dimensional shapes commonly encountered in mathematics and the physical world. Here are some important characteristics of each shape: Cylinder: Spheres: Both cylinders and spheres have properties that make them useful in a variety of applications. For example, cylinders are commonly used as containers for liquids or gases because they have…



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}