
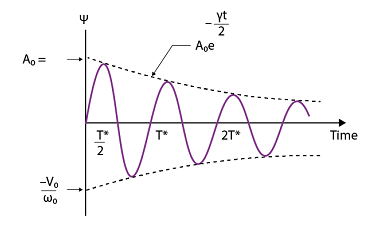
Damped oscillation (in one dimension)
Damped oscillation refers to the behavior of a system that undergoes oscillation (i.e., periodic motion) but with the amplitude of the oscillation decreasing over time due to the presence of damping. In one dimension, a simple example of a damped oscillation is a mass-spring system with damping, where a mass is attached to a spring…


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}