
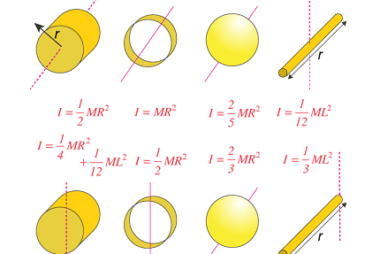
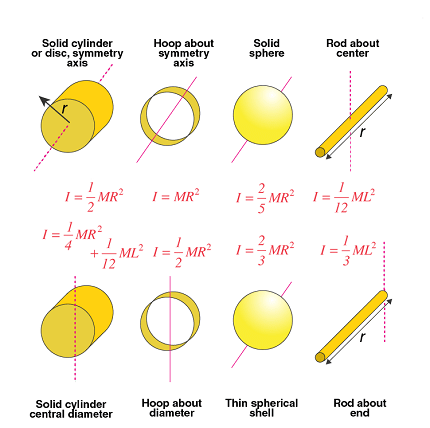
Moment of inertia of uniform bodies with simple geometrical shapes
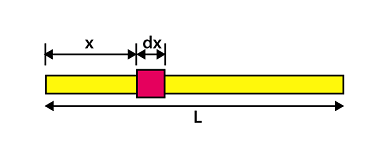
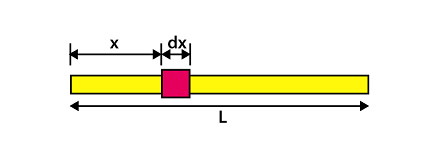
The moment of inertia of a uniform body with a simple geometrical shape depends on the distribution of mass within the body and the shape of the body itself. Here are some common examples: I = (1/12)ML^2 I = (1/2)MR^2 I = (1/2)M(R2^2 + R1^2) I = (2/5)MR^2 I = (2/3)M(R2^3 – R1^3)/(R2 – R1)…


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}