
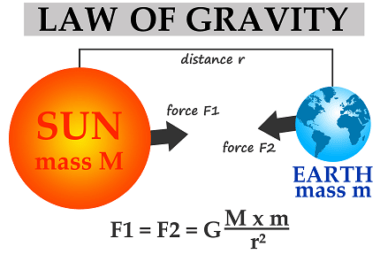
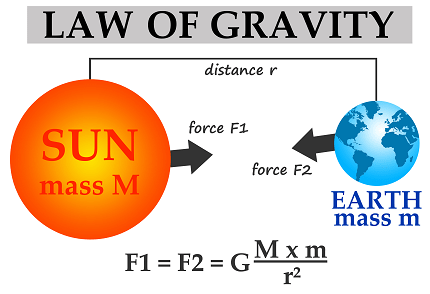
Law of gravitation
The law of gravitation, also known as Newton’s law of gravitation, is a fundamental principle in physics that describes the force of attraction between two objects with mass. The law states that every point mass in the universe attracts every other point mass with a force that is directly proportional to the product of their…

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}